67 lines
3.2 KiB
Markdown
67 lines
3.2 KiB
Markdown
|
|
|
|||
|
|
#### Brake without DynaStop option:
|
|||
|
|
|
|||
|
|
![[Pasted image 20241107151714.png]]
|
|||
|
|
|
|||
|
|
#### DynaStop enabled motors:
|
|||
|
|
***
|
|||
|
|
![[Imagen de WhatsApp 2024-11-07 a las 14.49.30_547095fc.jpg|625]]
|
|||
|
|
# Activating the function
|
|||
|
|
|
|||
|
|
|
|||
|
|
https://download.sew-eurodrive.com/download/html/27802922/en-EN/2508655041141416666507.html
|
|||
|
|
|
|||
|
|
##### Danger due to falling loads.
|
|||
|
|
|
|||
|
|
##### Severe or fatal injuries.
|
|||
|
|
|
|||
|
|
- Do **not** use the "Release brake/deactivate DynaStop® with FCB01" function in lifting devices or applications with loads that might potentially fall down.
|
|||
|
|
- Inhibit the function via the following steps:
|
|||
|
|
|
|||
|
|
- Deactivate the function of DIP switch S1/2 using parameter _Deactivation_ = **"1"** (Path: _Functions > Inputs/Outputs > Basic device > DIP switch functions > Release brake/deactivate DynaStop_® _deactivate with FCB01_ – _Enable_)
|
|||
|
|
|
|||
|
|
- Inhibit the function using the parameter _Release brake/deactivate DynaStop® with FCB 01 – enable_ = **"0"** (path: _Functions_ > _Drive functions_ > _FCB 01 Output stage inhibit_).
|
|||
|
|
|
|||
|
|
In case the output stage is inhibited by a control signal (digital input or process data bit), the DynaStop® function can be deactivated using the function "Release brake/deactivate DynaStop® with FCB01". For example, this allows to move loads freely using a horizontal conveyor.
|
|||
|
|
|
|||
|
|
Now make the following settings:
|
|||
|
|
|
|||
|
|
1. **Enabling the function**:
|
|||
|
|
|
|||
|
|
- **Via DIP switch S1/2**
|
|||
|
|
you switch the DIP switch S1/2 "Release brake/deactivate DynaStop® with FCB01 – enable" = ON.
|
|||
|
|
|
|||
|
|
- **Via the parameter setting**
|
|||
|
|
you deactivate DIP switch S1/2 by setting the parameter _Deactivation_ = **"1"**. (Path: _Functions_ > _Input/outputs_ > _Basic device_ > _DIP switch functions_ > _Release brake/deactivate DynaStop_® _with FCB01 – release)_
|
|||
|
|
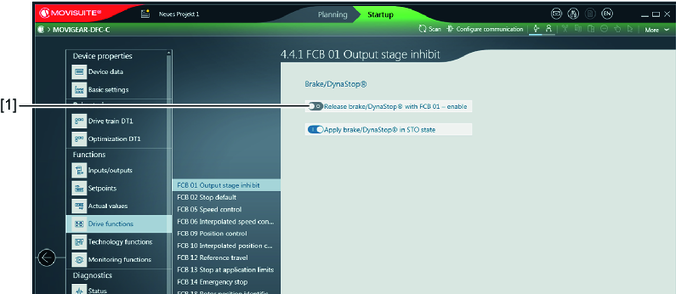
Release the function "Release brake/deactivate DynaStop® for FCB01 – enable" by setting the parameter _Release brake/deactivate DynaStop_® _for FCB01 – release_ = **"1"** [1]. (Path: _Functions_ > _Drive functions_ > _FCB 01 Output stage inhibit_)
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|

|
|||
|
|
|
|||
|
|
5. **Configuring the control signal**:
|
|||
|
|
|
|||
|
|
- **Control via digital input**
|
|||
|
|
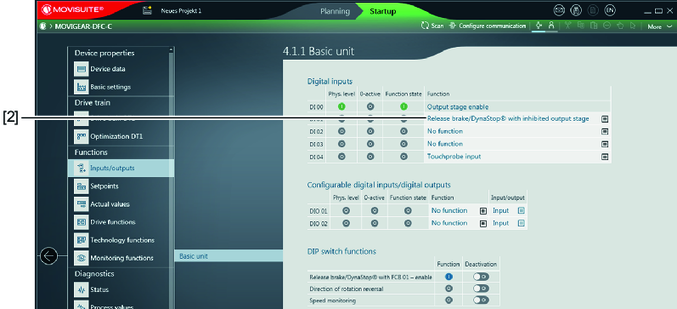
Assign a digital input with the function "Release brake/deactivate DynaStop® with FCB01" [2].
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|

|
|||
|
|
|
|||
|
|
- **Control via process data bit** (not available in DBC designs)
|
|||
|
|
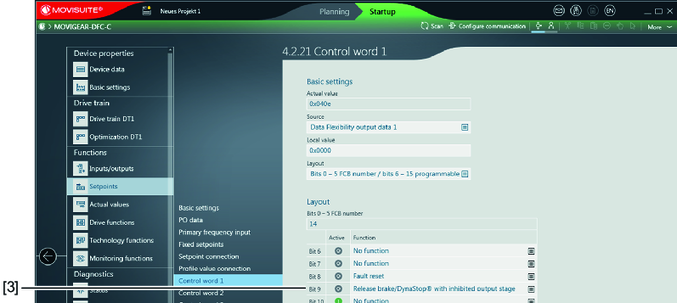
Assign a process output bit with the function "Release brake/deactivate DynaStop® with FCB01" [3].
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|

|
|||
|
|
|
|||
|
|
The set control signal can be used to deactivate DynaStop® when the function block FCB01 is active.
|
|||
|
|
|
|||
|
|
|
|||
|
|
### On the manual
|
|||
|
|
|
|||
|
|
![[Pasted image 20240925131406.png]]
|
|||
|
|
|
|||
|
|
### To be tested
|
|||
|
|
***
|
|||
|
|
![[Pasted image 20240925131415.png]]
|